 - Cricklewood Electronics")
0
£0.00
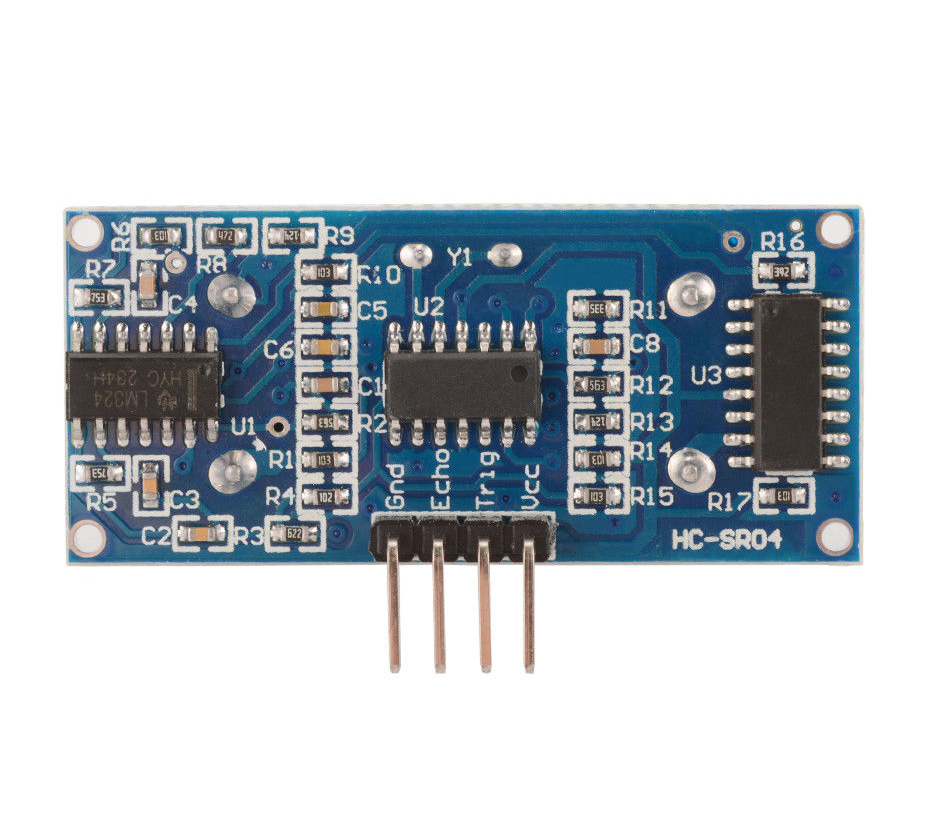
Ultrasonic Ranging Module for Arduino

Ultrasonic ranging module for Arduino and other microcontroller projects
This is a module with a 40kHz ultrasonic transmitter / receiver pair mounted on the front of a small PCB, with the required control circuitry on the back.
It sends a short 40kHz square wave out, and calculates the distance by recording the time it takes the wave to return to the sensor.
Voltage : 5VDC
Working Range : 20mm to 4500mm
Accuracy : 2mm
Example project:
HC SR04 Distance Measurement Tool
This article will demonstrate how to build a simple distance measuring device using the HC SR05 ultrasonic sensor board. This project can be used standalone as a way of measuring short distances or, it can be incorporated into other projects that require distance measuring. This sensor works best when the two transceivers are parallel to a solid surface, at a distance between 2cm to 450cm.
Here’s what you will need:
Tools
Step 1
First, you will need to connect the HCSR04 sensor to the Arduino. Simply use the male to female jumper leads to connect the two together as described below and in fig.1:
HCSR04 Arduino
VCC-----------------------------------------5V
Trig------------------------------------------D3
Echo----------------------------------------D2
GND---------------------------------------GND
Step 2
Solder the KY1602 module onto the 1602 LCD screen. Pin 1 on the KY1602 module is the one closest to the 4 data and power pins. Once soldered, you can now connect the LCD display to the Arduino as shown in fig. 1.
fig. 1 Step 3
Connect the Arduino to a computer and install the libraries mentioned above. If you need help installing the libraries, CLICK HERE for a quick tutorial.
Step 4 You can now start writing the code to get this all working: First, clear the IDE window. Then, include the aforementioned libraries:
Initialize the KY1602 I2C LCD driver (address 0x27 in this example) and specify the LCD display (in this case 16 characters, 2 rows):
Begin the void setup function. Initialize the LCD screen and turn on the backlight:
Add 100ms delay:
The completed code should look like this:
Step 5
Press the “Upload” button at the top (button with tick, located below “File”). The IDE will now compile the code and upload it to your Arduino (this will take a few moments).
Step 6
All done! The LCD will now start to display the distance calculated by the sensor.
|



")
")












